Enquanto a tralha não chega vamos ao planejamento do que pretendo fazer: Vou utilizar a mesma base que utilizei no primeiro, o “Tamiya 70100 Track and Wheel Set”. Ele teoricamente consegue andar em “qualquer” terreno:
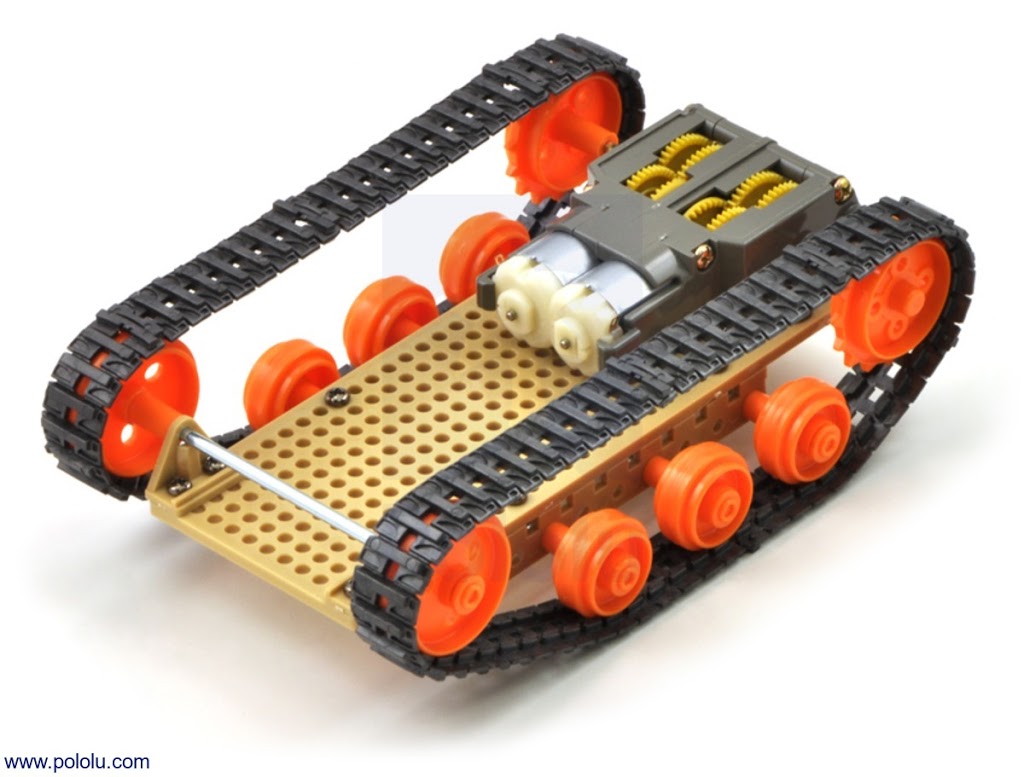
Fonte: https://www.pololu.com/product/106, custa $7.95 atualmente.
O motor não vem no kit, então pra funcionar 100% utilizarei o motor da Tamiya mesmo, o “Tamiya 70097 Twin-Motor Gearbox Kit”:

Fonte: https://www.pololu.com/product/61, custa $8.95 atualmente.
Ele é perfeito pro kit, adaptar algo novo tendo esse modelo pronto seria desperdício de tempo e $, visto custo baixo dele. Como nem tudo é fácil, o problema dele é que os motores padrão trabalham em uma faixa de 3-6 volts e precisa de mais amperes. No primeiro modelo eu sofri um pouco em movimentar ele, perdia força muito rápido ao movimenta-lo muito. Vou trocar esses motores por um que opere em maior voltagem e menor amperagem. Um motor como o da Adafruit que operam entre 4.5-9V. (https://www.adafruit.com/products/711 custa cada $1.95).
Dito isto vou usar também o Raspberry Pi Zero com uma câmera e preciso de uma placa que controle motores, um Shield/HAT com duas Pontes H pelo menos. Na primeira versão eu usava um Shield de Arduino do Laboratório de Garagem (Eles fecharam a Loja que tinha perto do Metrô Santa Cruz), dessa vez quero centralizar tudo no Raspberry Pi Zero.
Se tiver alguma sugestão só postar nos comentários!


